
生产研发流体设备制造企业
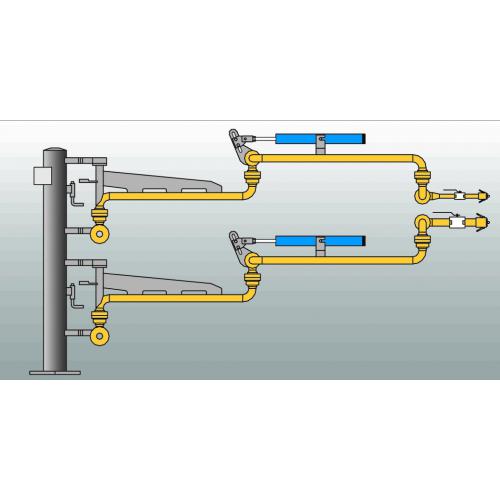
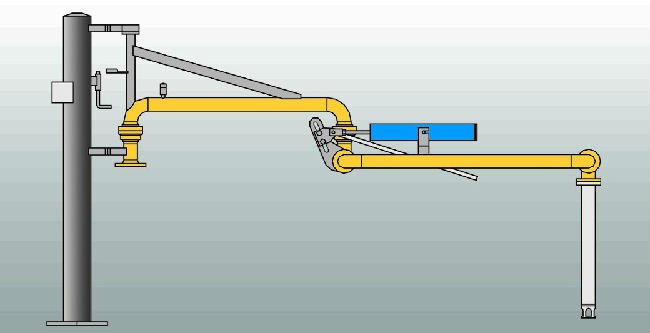
鹤管、浮盘、活动梯
全国服务热线
13912168639
连云港阿斯塔石化设备有限公司
电话:0518-85833170
手机:13912168639
联系人:涂女士
地址:江苏省连云港市大浦工业区临洪大道
邮箱:ashtar@ashtar.cc


联系人:涂经理 服务热线:13912168639
地址:江苏省连云港市大浦工业区临洪大道
Copyright © 连云港阿斯塔石化设备有限公司 版权所有 苏ICP备11002961号
技术支持:连云港开创网络
全国服务热线:
13912168639